"Impossible" aspects

A quick overview of a few anomalies about this drone that are regarded as impossible unless a device is actively manipulating light, gravity, space, and time.
Flight Path
Here is an accurate recap of the drone's entire flight path. Keep this path in mind as you learn about the drone's anomalous characteristics, the distortion it causes in the video, and the cognitive and biological phenomena I experienced. This path is crucial for concluding the drone's use of gravitic propulsion. Although I do not remember the exact flight path with 100% accuracy, the drone's altitude and placement in the street are extremely accurate. The drone's speed in the reenactment above, except for its descent from the hospital to the apartment window, is also very similar to its speed in real life. I can not accurately remember the exact number of times the drone moved back and forth on its horizontal axis after each time it repositioned in the street. It is also essential to remember that during the video, the drone began its descent once the redshift onsets in the drone's core, and its descent lasted until it rotated towards the ground at around the 4.5-second mark. The section of the reenactment that depicts the first 4.5 seconds of the drone video is an estimation since I did not see the drone from my POV while recording until it was directly above the apartment and angled towards the street. Later, I will provide you with my complete witness testimony, including a recap of what I witnessed before I started recording the video, when the drone was at window level for around 30 seconds and less than 60 feet directly in front of me.
Redshift, Blueshift, & Black Trail






In person, the drone never emitted any color or light besides a red light at the top and bottom of the device. These two lights were necessary for the operator to control the drone, and the lights' position on the drone remained constant throughout the entire flight. The red-orange glow in the middle of the drone in the video is caused by the camera capturing light behind the drone being pulled into the drone's spacetime expansion zone, not a physical red light within the drone. This explains why this phenomenon is most visible when the drone's center aligns directly with the camera and disappears once the drone's core rotates away from the camera. The blue, purple, and green you see around the drone are a blueshift of light due to spacetime compressing in its wake. These color changes occur because the drone’s propulsion system operates by warping spacetime, expanding space ahead of its path and compressing it behind, causing a shift in the wavelength of visible light that is undetectable by the naked eye. Unlike a conventional propulsion system that must expel mass in the opposite direction to generate thrust, this field-based alteration allows the drone to fly by shifting its localized warp bubble through the surrounding environment. A craft causing redshifts and blueshifts is a fundamental principle in most warp drive theories.On video, the redshift starts from the direction of the drone's travel, and the blueshift begins in the opposite direction, aligning perfectly with existing theories of an Alcubierre-type anti-gravity drone. This phenomenon is only apparent on camera due to the camera's ability to capture frequency shifts that the human eye can not see. If this red glow were an emission from the drone and not a frequency shift, it would not completely disappear on camera while the core is still visible. The location of the drone's redshift and blueshift also perfectly coincides with the two periods of time dilation that I experienced when the drone was only ~50 feet in front of me and while it passed directly overhead.
Warped Middle



In person, the entire middle of the drone was fully transparent. It looked almost exactly like the "My POV" photo above, except the middle was in the shape of a pneumatic tube. Both sides of the drone featured an extremely thin sheet of metal, connecting the top and bottom lights with the tubular middle. Besides the two lights, the sheet of metal on each side, and the tubular middle, the drone had no other visible components. The middle of the drone warped the light directly behind it, with the warped light always following multiple wave patterns proceeding from the top, bottom, left, and right of its core. All of the wave patterns appeared to converge towards the center of the drone. While the drone was operating in the street before its ascent towards the hospital, it was pointed directly at me for the entire time, which lasted for approximately 30 seconds. When the drone operator repositioned the drone to appear as if it were directly in front of me, I had a clear view of the drone’s core as it ascended vertically and was angled upright, as depicted in the "My POV" picture above. When the drone started its movement during this period, it was ~5 feet above the ground on the opposite sidewalk, only a few feet in front of the trees, and appeared to be positioned directly in front of my apartment window as it slowly ascended. The warp never appeared to contain straight lines or jagged edges, just multiple moving waves converging towards the very center of the drone. As I looked through the top-middle section of the drone's core, I vividly remember the grass above the wall bleeding into the graffiti in a U-shape. The grass behind the graffiti appeared close to black instead of its original green color when viewed through the drone's center. Each wave pattern in the drone was clearly defined at its edge, and each wave would constantly move as the drone climbed, with new waves emerging from each direction every second or so. The waves emerging from the side of the drone moved horizontally, while those from the top and bottom moved vertically towards the center. However, I can not remember the wave's pattern with 100% confidence, and whether the waves were oscillating or if new waves were emerging from the outside of the drone.Each new wave also seemed to be slightly different in its shape, even if it originated from the same side of the drone's core. A small area in the absolute center of the drone's core featured no waves, indicating that it was either the attractor or source of the wave patterns. The drone appeared to move the slowest during this period of its flight, and I observed this vertical climb for ~6 seconds. Aside from this slow climb directly in front of my apartment window, the drone moved at a constant speed throughout its entire flight. Initially, I assumed that the drone's core could have been a liquid, as looking through the middle was like looking through a rippling pool of water. If you told me that the core was plasma, I would have believed you initially, but it was just the light warping that produced that appearance.


In the next section, I prove that the drone's core was transparent by showing that its red lights become visible when adjusting the color values of its core at the start of the video while it faces the hospital. Each side of the drone is clearly visible in the video, so aside from my eyewitness testimony, you can be entirely sure that the propulsion system is wingless and propellerless, both internally and externally. Altogether, I am completely certain of the drone's exterior appearance, and I am completely certain that the drone's core was a pool of warped light with no wings or propellers.
Four Flight Modes IRL
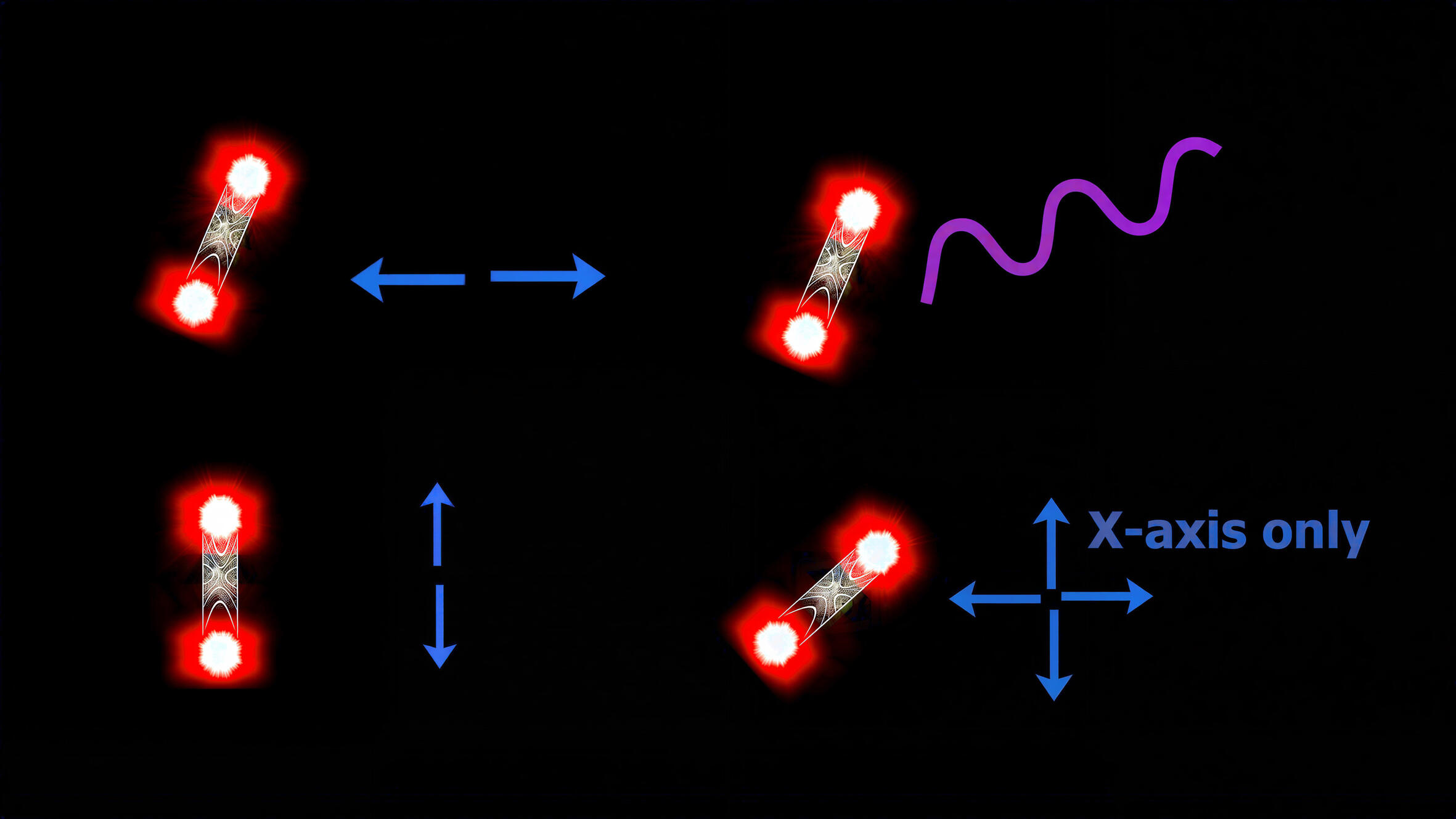
In real life, the drone had four distinct modes of travel. In every mode, the top light of the drone led the drone’s travel, while the bottom light trailed behind. Though the drone's angle abruptly shifted preceding each change in mode or direction, the drone’s shape and size stayed constant throughout its entire flight. The first mode I'll describe is its lateral movement. In this mode, the top light would angle to the left or right at around 25-30 degrees, and the drone would immediately glide in the direction that the top light was facing. In this mode, the drone could only travel left or right, not forward, backward, up, or down. The second mode involved a movement where the drone was angled perfectly vertical, and the drone would either ascend or descend. In this mode, the drone could only travel up or down on its vertical plane. The third mode was a wave-like motion that allowed the drone to travel on its horizontal and vertical axes simultaneously. In this mode, the drone swam like a fish through the air, evenly increasing the height of each peak and trough with each new wave. During this mode, the top light was never even with or lower in altitude than the bottom light as it was climbing. In the fourth and final mode, the drone would quickly snap to a 45-degree angle and drift in whatever direction the top light was facing. In this mode, it could only travel horizontally, but it could move in all four directions on its horizontal plane. In this mode, it was even more evident that the drone was effortlessly floating through space. In the other three modes, it was clear that it used no conventional form of propulsion, but in this fourth mode, the drone seemed to relax and effortlessly glide through the air like an object floating in outer space. In this mode, the angular shift of the top light when it changed directions was much quicker and more aggressive than in every other mode.
3 Modes On Camera
The video starts with the drone in its 45-degree mode. Something noteworthy is that the beginning of the video is the only period during the entire encounter when the drone's top light did not lead its flight. During this period before the redshift is visible, the drone is floating smoothly through the air, akin to an object’s movement in a zero-gravity environment. Immediately after the first sensor glitch, the drone switches to its wave-like travel mode, although its movement in this mode is exponentially less pronounced on camera than it was in real life. Remember that during the video, the drone approaches the camera and drastically descends in altitude, although this movement is difficult to tell as the drone does not enlarge proportionally on camera. When the drone and its field rotate to face the street immediately before the video goes black at around the 5.5-second mark, the drone switches from its wave-like mode to the mode where it ascends and descends vertically. During this period, the drone rotates counterclockwise around its vertical axis until its lights are pointing towards the ground. This means that the mode that once propelled it only vertically now propels the drone only horizontally. I observed this period in person, as I got a clear view of the drone passing above the apartment window, which is captured during this section of the video. At this point, I visually observed that the drone was clearly facing the ground and traveling to the left of the camera.
Fluctuating Shape & Size




One of the most apparent and unusual aspects of the drone is that it appears to change size and shape throughout the video. In person, the drone's size and shape remained constant throughout its entire flight. The drone was about the size of a stoplight; I would estimate that it was around 2.5 to 3.5 feet long and around one foot wide. Despite the size never scaling accurately on video as it moves closer to the camera, the drone's length and width fluctuate throughout the video, with it sometimes shrinking despite moving closer to the camera. It appears to be different sizes on video due to the drone's localized spacetime manipulation affecting how the camera pipeline processes light. The warp bubble's properties fluctuate throughout its flight, constantly changing how the drone's light is bent and subsequently interpreted by the camera. This phenomenon is best observed when the drone’s redshifted middle is aimed at the camera from frames 65 to 94. When this happens, it becomes clear that its gravitational field bends light paths. As shown in the first photo above, the camera isn’t capturing the drone's actual top and bottom red lights while the redshift is visible; it’s capturing the warped light from them after it’s passed through the drone’s field. The color and shape distortions are perfectly consistent with what you would expect if a warp field were actively manipulating the intensity and path of surrounding light. The same field-based lensing briefly demagnifies the craft around the compression zone, making the bottom half of the drone appear to shrink in size multiple times throughout the video.


The frame that most closely resembles the drone's appearance in person is the frame on the left. An interesting fact about this frame is that when you rotate it 45 degrees, the drone is angled perfectly vertical. This is noteworthy when you consider the distinct 45-degree mode that I witnessed in person and documented before I noticed the rotation anomaly in this frame. 45 degrees is likely the angle where the drone's warp bubble is most stable.
Foreground Light Manipulation
The drone causes the ISP to incorrectly assume that the drone’s movement and influence on the surrounding space is actually the camera physically moving, so the ISP shifts the drone’s field of influence up and down accordingly. The camera only senses movement in the drone's area, so it keeps the middle and bottom of the frame anchored in position, and shifts the top of the frame to stabilize the presumed camera motion. After incorrectly assuming that this anomalous movement surrounding the drone is camera movement, it shifts the entire region to compensate. This is also partially influenced by the weak signal surrounding the drone, which is confirmed by the drone's effect on the surrounding luminance, causing the drone to hold an abnormally large percentage in the ISP’s motion calculation for the top of the frame. Altogether, the ISP’s perception of stability in the areas under the drone and motion in the drone’s entire surrounding area provides further evidence of unconventional distortions in the entire area surrounding the drone that significantly confuse the ISP’s ability to actually determine motion. What initially seems like a miscalculation by the ISP becomes stronger evidence for the drone’s use of a warp bubble. The camera is not making an error by perceiving that the entire area surrounding the drone is moving, as it actually is. Remember that with a warp bubble, the drone does not actually move through space, but the bubble moves the space around the drone. However, since the sensor is not aware that it is filming a warp bubble that manipulates the space around it, it attributes this motion to physical camera motion. Additionally, the presence of upward and downward shifts matches a logical sensor interpretation of the drone’s wavelike motion that I observed in person, which was required for the drone to move on its x and y axes simultaneously.
Severe ISP Failure as the Drone Rotates and Flies Directly Overhead



light lag As the Drone Passes Overhead
Multiple times throughout the video, the brightest lights in the frame persist through the following frames and slowly fade away, instead of changing with each frame. This phenomenon is called charge lag, and it happens when a CMOS sensor’s photodiodes hold charge longer than expected. The primary causes for this are either an extremely bright light entering the scene or a photon increase that exceeded the sensor’s limit, causing the brightest pixels to hold their charge for longer. As you can see, no extremely bright light enters the scene, and there is no brightness spike, leaving the only logical cause to be each pixel well receiving a sudden increase in photons, which causes the brightest pixels to exceed their limit, causing them to persist over the next few frames instead of resetting after every frame. Given that the drone is the only variable in the frame, and the fact that this only occurs when the drone’s field is close to the camera, it is only logical to conclude that the drone causes this image lag due to an anomalously large increase in photons in its vicinity. This phenomenon occurs again around fifty frames after the foreground light first warps while the drone travels above and to the left of the camera. Once again, this warp is not caused by any movement from the blinds or phone. The phone was almost perfectly still, and the blinds were in the same position throughout the entire encounter. This proves that the stabilization system was still detecting an abnormally high downward movement from the camera, despite none being present. This leads us to the next ISP error, the three consecutive true black frames.
True Black frames
Compression Zone Optical flow algorithim failure
This video is what appears when you apply an optical flow time interpolation to the video. Optical flow is a video analysis method that estimates the motion of pixels between two adjacent frames of a video. Due to the ISP's inability to accurately process motion in the scene, severe warping is present throughout this entire section, which lasts until the video ends. Since the drone descends and approaches the camera, it makes sense that motion estimations would err the most once the field is close enough, causing the entire frame to warp. This is exactly what happens when the drone flies overhead.
Muted Movement & Scaling Issues
For the entire video, the camera is in the drone’s spacetime expansion zone. Despite the drone descending towards the camera in a wavelike motion with alternating peaks and troughs for most of the video, its movement and scale in the video never reflect how it traveled in real life. From the start to the end of the video, the drone traveled ~200 feet towards the camera as it drastically descended in altitude. What initially seems like an impossible camera anomaly becomes a smoking gun for concluding the drone’s manipulation of the surrounding spacetime. In the expansion zone, as the drone approaches you, the distance between you and the drone would also increase, nullifying any instrument's ability to accurately depict its approach. This makes this technology perfect for stealthy operation, as air defense sensors fail to accurately determine the object’s position, making the drone virtually impossible to counter with any air defense technology. The drone flying closer to the camera is confirmed by my visual observation of the drone’s position right before I started recording, and its position directly overhead during the video's blackout at around 5 seconds in the video when the camera enters the drone's immediate field. If this is confusing, here is an analogy. Think of the drone as working like a table fan, pulling the air behind it to push it out of the front. As the fan moves closer to you, the amount of air between you and the fan increases. Now imagine if this fan sucked in spacetime from the back and pushed it out the front. As the fan moves closer to you, the amount of spacetime between you and the fan increases proportional to its movement, causing the fan to appear in a fixed position.
Time Discrepancy
During this portion of the encounter, I did not observe the drone rotating into its horizontal position as it does on video. When I said "Bro wtf," the drone was already completely horizontal, although the video shows me saying "Bro wtf" before the rotation even begins. I vividly remember this part of the drone's flight, so I am entirely confident that the drone's rotation on video occurs after it already finished rotating in real life. No other technology can cause such a major discrepancy between a drone's measured and actual position. Altogether, the drone's ability to alter how an instrument perceives the position, intensity, and timing of the photons in its vicinity makes this technology impossible to effectively counter.In the flight path reenactment at the top of this page, I depict this period from the camera's viewpoint.
Struggling Optical Image Stabilization
(Volume Up)
Although you should never blindly trust AI as it is not a credible source, ask any AI, "If a drone were flying and manipulating time and space, what would it look like on an iPhone camera?" Unsurprisingly, you will notice that the drone video matches most of the prompt's responses. These are just a handful of the "impossible" aspects of the video. Read the "Video Analysis" and "Who Are We?/Who Protected Us?" sections to learn more about the drone, along with the true purpose of this event. I also strongly recommend that you analyze the video yourself to uncover even more anomalies; I'm only presenting a few anomalous artifacts in both sections.

East Coast
January 1
Matthew Livelsberger specifically instructed Sam not to release his message until January 1 and warned that China was ready to attack anywhere on the East Coast. You must ask yourself how Matthew accurately predicted the time and location of this Chinese attack despite having no connection to China. Given that he was a high-level military insider among other things, it is clear that he had foreknowledge of China's plans.
Key Flight Zones & Flight Recap

Here is a model of the approximate locations of the key moments throughout the drone's entire flight. Again, the drone consisted of two bright red lights, two extremely thin sheets of metal, and a completely transparent, warped middle section. I accurately remember its positioning and most of its movements, although I cannot recall the exact order of the drone's flight path with 100% accuracy. Throughout its entire flight before its ascent towards the hospital, the drone was in the middle of the street, either inside or close to the intersection. Before it ascended, I witnessed it in operation in the middle of the street about 40 to 60 feet in front of me, and it was only slightly above window level at its highest point. As I sat upright in my friend's bed daydreaming, I saw an unusually bright red light shining at the window. Before I opened the sunshades, I had a weird feeling that the light outside was something extremely abnormal. You could say I “felt” the drone before I saw it. Once I opened the sunshades in the apartment, I witnessed two extremely bright red lights near the intersection, slightly above window level, pointing directly at me with the top light angled towards me, while the drone moved laterally in my direction. My face immediately lit up like a kid in a candy store. I was overcome with nothing but awe, intrigue, and happiness as I observed the drone, since I thought that a baby alien accidentally teleported to the middle of Atlanta. I did not feel fear, shock, or worry for even a single second as I watched it gracefully dance through the air. The drone's beauty was indescribable; it felt like E.T. changed forms and found a new best friend. The device was always in motion, and its speed remained constant except for the vertical movement I described earlier. About a second after I first saw the drone, it quickly switched directions by tilting its top light and began moving away from me on its x-axis. After traveling away from me for 2-3 seconds, it repeated this same side-to-side movement. Once it was near the middle of the intersection, the drone angled its top and bottom lights perfectly vertical before descending and moving a few feet closer to the ground. Then, it moved towards me again, performing its same tilt and side-to-side movement a few more times. After this movement, my memory went completely blank, and the drone was now lined up directly in front of me, just a few inches in front of the tree on the opposite sidewalk. At this moment, the drone was ascending at a perfect 90-degree angle relative to the ground.
As it began to ascend in front of me, I got the best view of the warp pattern in the middle of the drone. This is also where I experienced the double memory and other conscious effects that I mentioned in the next section, where I describe the neurological and biological effects of the drone. After it finished this movement, it traveled in a wavelike motion close to the intersection, but this time it was much closer to the apartments, and its altitude was around window level. As it flew to this position, it didn't fly in a perfectly vertical or horizontal motion on its x and y axes as it did previously; it was swimming in a wave pattern like a dolphin in water. When the drone was close to the edge of the building, it activated "float mode," its final, and in my opinion, its most beautiful mode of flight.
Let me give you a recap of the four modes again. I’ll refer to them as basic mode, vertical mode, wave mode, and float mode. Basic mode represents its horizontal travel; vertical mode represents its y-axis movement; wave mode represents its fluid, non-axial, and wave-like travel; and float mode represents the effortless 45-degree horizontal mode. In all four modes, it was clear that there was no visible form of propulsion. However, float mode was by far the most intriguing mode. In this “float mode,” the drone quickly snapped to a 45-degree angle and effortlessly floated through the sky on its x-axis in the direction where the top was angled. In its basic mode, the top light only angled to ~25-30 degrees for its lateral movement. In float mode, it was clear that the drone was floating on its own medium, completely ignoring the influence of any external force. It cycled through this mode a few times as it moved horizontally in all four directions on its x-axis, instantly and effortlessly snapping to a 45-degree angle each time. At one point, it cycled from this mode back to its basic mode, then back to float mode, all while staying on the same x-axis in the same area, so I am entirely sure that this mode is different than its basic horizontal mode. After this movement, it traveled in wave mode as it ascended to the spot where the video starts. Initially, I did not record the drone while it was in front of me as I thought the "baby alien" would instantly recognize if I was trying to record it and teleport away. Once I saw that it started ascending at the same speed as it was moving earlier, I became confident of my suspicion that it was a slow baby alien who just learned how to fly. As it ascended, I thought that this was my one and only chance to capture an alien on camera. So, I quickly reached down to grab my phone and start recording. Right before I started recording, I only saw the drone in the sky for a split second. When I started recording, I knew it was still in the area because I figured it was still moving at a constant speed, so I just pointed the phone toward where I thought it might be and hoped I hadn't missed my chance. As I started recording, I quickly glanced at the sky and back at the camera to see if it was still there. As I zoomed in, I was unsure if the drone was in the frame, as I could not locate it in the sky. I only clearly saw the drone's position in real life at around the video's 5-second mark when it pointed towards the ground, an orientation it had never been in before I started recording. I also remember viewing the drone angled towards the street for much longer than the one second shown on video. Initially, I assumed that the lights on the drone stretched around the entire top and bottom; I did not realize that the drone's lights were pointed directly at me for the entire time before its ascent until I closely examined the video after Matthew Livelsberger's warning.Immediately after ending the video, I looked outside to see if my alien assumption was wrong, and if anyone on the sidewalk or under the bridge was flying the drone. There was no one present, and no cars came down the street except for the tinted black car you see at the 9-second mark. During the entirety of the drone's flight, this was the only car that traveled on the street. I noticed the black car turning right onto Auburn Pointe Drive after ending the video, but I assumed it was just a random car, as I didn’t realize that I filmed the car at the end of the video until a few weeks later. I found it extremely strange once I noticed that I filmed the black car, as I remembered it turning a few seconds after I stopped recording the video, and not immediately after. I vividly remember first looking to the right of the window to see if there was anyone who flew the drone, before looking to the left, the direction the car came from. I remember seeing the car about to turn after completing these head movements, which I recall finishing around 3-5 seconds after the video ended. I later learned this was another example of time dilation from the drone, a conscious effect I expand upon in the next section. Despite seeing the car, I didn’t see anyone on the street, so I continued with my assumption that I saw a friendly alien. A few seconds after I realized the drone wasn't coming back, I walked around the apartment, excited and shocked, with my hands on my head, continuously jumping, running around, and saying "HOLY SHIT," "WTF," and "OMG," for about 45 minutes. It was the happiest moment of my life; seeing an alien was at the top of my bucket list, and it looked so welcoming, beautiful, and friendly. I thought that it even gave me a little dance to show off how cool and friendly it was. I wasn't aware that I was feet away from a top-secret WMD of planetary-level destruction flown by Chinese special ops soldiers on American soil. However, part of me initially knew that there was a chance it could be government technology, but I was too caught up in the beauty of the drone to care, and I thought, "If I die, at least I died happily and in a cool way." Initially, I assumed I only saw the drone before I started recording for around 3 to 4 seconds, until I realized that 3 to 4 seconds was impossible after considering the video's length, its flight path, and constant speed. This time dilation I experienced is verifiable by examining the text messages I sent immediately after the attack. I provide these messages in the "Who Are We?/Who Protected Us?" section. The entire time on video, the drone appears to be much further away than it was in person. It also appeared much bigger in person than it was on camera, despite my camera being zoomed during its approach.Now, if you believe that I am lying about the drone's flight path, find another location in the area with a clear path and a flat reflective surface that is discreet enough to launch this drone from. You will find none. When I started recording the drone in the sky, it was nearly invisible from my point of view. How could I have recorded this drone and known its position if I were not alerted beforehand? I also would not have experienced the biological and conscious effects documented and described in the next section if I were not inside the drone's warp field. Consider why the drone operator would fly the drone back over the apartment if it did not originate from that general direction, especially considering that their car traveled into the apartment complex after it flew overhead. This situation is far too serious to lie about or even slightly exaggerate any minute detail. Later, I will also provide proof that the Chinese and U.S. governments are fully aware that I witnessed their most secret technology and recorded the only "UFO" video ever taken that proves the operational use of spacetime manipulation and the first video showing the inside of a warp field. You will also learn how I was able to release this info against their will. So ... keep reading.
Tree Damage

When the drone flew vertically from ground level as it appeared to be positioned directly in front of me, its ascent began directly in front of the orange sign next to the crosswalk. On May 7, the date of this picture and 126 days after the attack, this tree is the only tree on the street struggling to grow leaves. This is a theorized biological effect of spacetime warping on plants.
Secret Service Response
Not impossible per se, but here is something else highly unusual. Less than 72 hours later, a 60-hour-long secret service operation was conducted on the neighboring street. This operation featured a government bus that had a perfect view of the entire street of the drone's travel for the entire event, a Secret Service IMSI catcher that explicitly targeted me, and buses cycling the area every 3-5 minutes for 60 hours straight in multiple directions. Many buses also cycled in the opposite direction from the Jimmy Carter Center, despite there being no Jimmy Carter event-related purpose for this movement. This event also received very little promotion and was never busy except for the first hour of the event when FOX 5 Atlanta was present. I later provide evidence that I was selectively targeted by their IMSI catcher, expand on the unusual nature of this "Jimmy Carter" event, and give more evidence for its relation to the Chinese anti-gravity drone in the "Who Are We?/Who Protected Us?" section. Just like the drone video, all of this is publicly verifiable.
Before you even think to discredit, or believe someone discrediting what Matthew and I are showing you—ANALYZE THE VIDEO AND ALL EVIDENCE YOURSELF. Understand, your opinion is completely invalid until you investigate yourself. Even if you believe me, I encourage you to analyze the video, along with the improbability and interconnectedness of the situation itself, which I will elaborate on and explain later. Verify the metadata, hex data, and use any other method you can think of to be sure of its validity. In the next section, I will prove the video's authenticity to the best of my ability. Understand the nature of this technology and the forces that benefit from denying its existence. Once you understand the video's validity, the full authenticity of Matthew Livelsberger's warning, and the authenticity of my testimony, the truth will be clear. We have no motive other than to present you with the truth. Can you say the same for your government and the governments we are exposing? Keep reading, it gets far more "impossible" from here.
DRONE VIDEO LINKS
Proton
https://drive.proton.me/urls/RJC4PYSMRW#05s0O68z093CCatbox
https://files.catbox.moe/lqx4gl.MOV
Hex Data
https://drive.google.com/file/d/13sLxVi2fI-a7a6_dzcggBoRtfK-MaSrR/view?usp=sharingMetadata
https://drive.google.com/file/d/19rxhrfwu3NlHmg78d4NUVWGnkhSB2Rd6/view?usp=sharing